|
Eunju Kwon I'm a first-year MS student at GIST CILab advised by Prof. Kyung-Joong Kim. |

|
ResearchI'm interested in Robot Learning, focusing on humanoid robot research for Vision-Language-Action models using human data and tactile sensor data. My research aims to develop the methods learning skills for robots in real-world environments. |
|
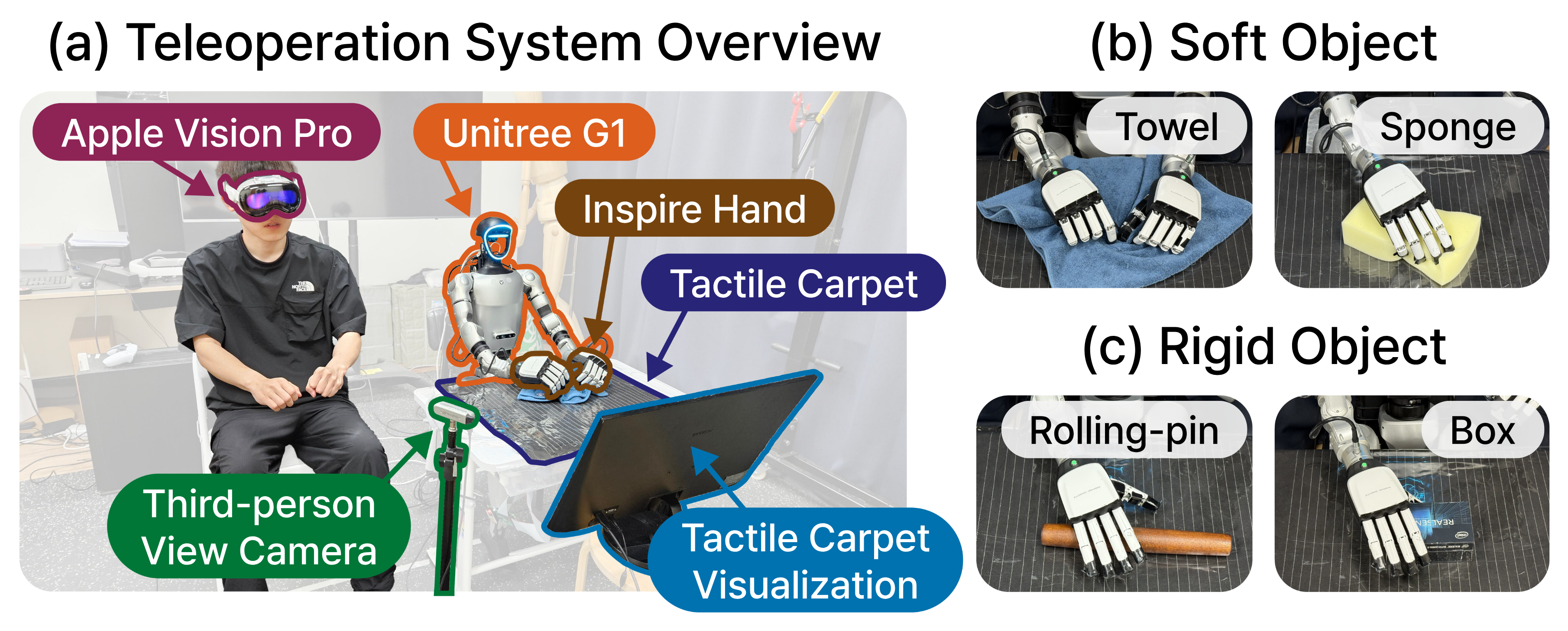
A Humanoid Visual-Tactile-Action Dataset for Contact-Rich
Manipulation
Eunju Kwon, Seungwon Oh, In-Chang Baek, Yucheon Park, Gyungbo Kim, JaeYoung Moon, Yunho Choi, Kyung-Joong Kim, arXiv, 2025 arXiv By constructing a humanoid visual-tactile-action dataset for contact-rich manipulation, we provide a data representation that captures diverse pressure conditions. |
|
Borrowed from Jon Barron's source code. |